
Die
Dokumentation zu meinem jugend forscht Projekt
1.Einführung | 2.Ein
intelligentes Fahrzeug | 3.- 3.4 Hauptteil | 3.5
Hauptteil | 3.6 - 3.8 Hauptteil | 4.Ergebnisse
Fahrerlos
zum Ziel
Mikrocontrollergesteuertes Fahrzeug mit Ultraschall-Sensorik
1993 von Holger Buß
2.Platz Bundesausscheidung Technik
2.
Ein intelligentes Fahrzeug...
Betrachtet man die Zeichnung, kann man sich ein Bild vom Aussehen des Fahrzeugs machen.
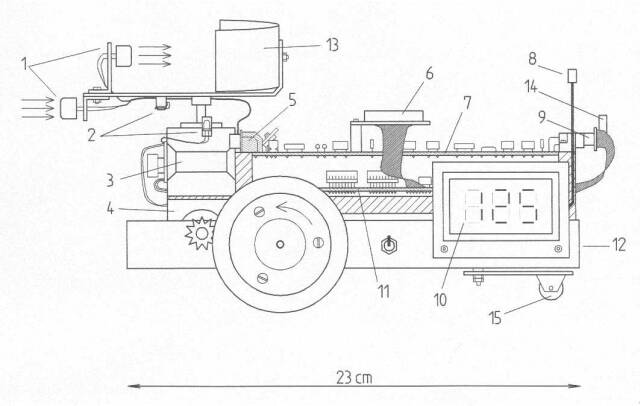
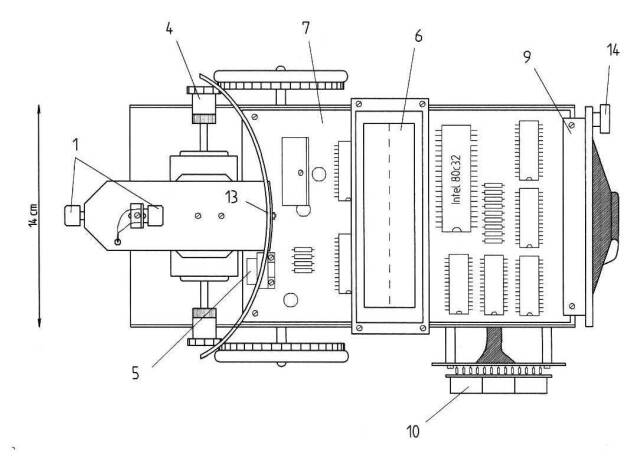
Die Elemente des Fahrzeugs:
1:Ultraschall-Wandler 2:Infrarotsender und -empfänger für Rotornullpunkt 3:Schrittmotor mit Treiber für den Rotor 4:Schrittmotor mit Übersetzung 4/1 zum Antriebsrad 5:Schnittstelle zur Spannungsversorgung 6:LC-Display 7:Controllerboard 8:Infrarotempfänger 9:Schnittstelle zwischen Controller und Treiberplatine 10:Abstandsanzeige 11:Adreßdecoderplatine 12:Platine für Ultraschall-Abstandsmesser und Infrarotauswertung (nicht sichtbar) 13:Schallreflektor 14:Piezo-Beeper 15:Stützrad
Schaltet man das Gerät ein, dann meldet es sich zuerst mit
drei Beep-Tönen, der Rotor dreht sich in die
Nullposition, schwenk dann wieder nach vorn und mittels des LC-Displays
wird man zum Senden eines Befehls
aufgefordert. Unter Befehl versteht das System das Betätigen
einer der 44 Tasten der Infrarotfernbedienung.
Man kann so da Fahrzeug selbst fernlenken, indem man die
verschiedenen Befehle für Drehen und Vorfahren
direkt sendet. Soll es sich jedoch selbständig zu einer
Zielkoordinate bewegen, dann muß als Befehl die Taste
,,MEMO" betätigt und dann die Koordinate gesendet werden.
Als Ausgangspunkt betrachtet der Control1er die Koordinate X:500
/ Y:0, die in Zentimetern unterteilt ist.
Durch das Festlegt der X-Ausgangskoordinate auf 500 vermeide ich
das Übertragen negativer Zahler. Wenn das
Ziel also z. B. 80cm vor und 20cm rechts neben dem Fahrzeug ist,
so muß die Zielkoordinate 520/080 gesendet
werden.
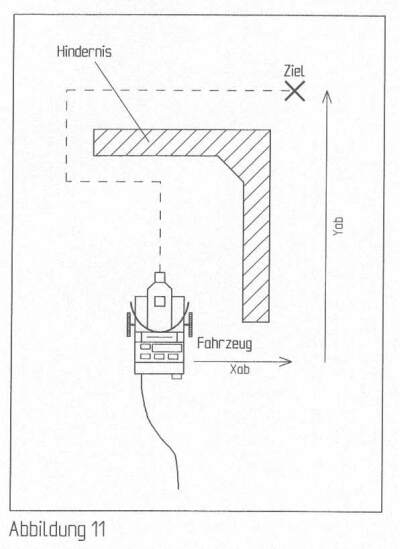
Jetzt versucht das Fahrzeug die Zielkoordinate, durch geschicktes
Ausweichen von Hindernissen, zu erreichen.
Dabei geht es immer nach dem programmierten Schema vor. Es ist
ihm zwar nicht möglich, aus einem sehr
komplizierten Labyrinth zu entkommen, doch für Hindernisse und
Sackgassen reicht es.
Mittels des Rotors kann das Gerät auch die Abstände zu
Hindernissen messen, die sich neben ihm befinden. Der
gemessene Abstand erscheint unmittelbar auf der dreistelligen
Anzeige an der Seite des Fahrzeugs. Nur durch
dieses Ultraschall-System ist es dem Controller möglich, sich
ein Bild von seiner Umwelt zu machen.
Es ist noch zu bemerken, daß es sich nur in X- oder Y-Richtung
bewegt, nie diagonal. Durch Einsetzen eines
anderen Programms währe dies selbstverständlich möglich, doch
ich habe mein Programm nicht dafür
ausgelegt, da es nicht zu groß und zu kompliziert werden sollte.
In den folgenden Teilen wird die Elektronik und Mechanik
weitgehend erklärt. Ich habe jedoch auf eine
ausführlichere Schaltungsbeschreibung des Controllers verzichtet,
da das den Rahmen meines Berichts sprengen
würde.